隨著科技的進(jìn)步以及現(xiàn)代化進(jìn)程的加快,人們對搬運速度的要求越來越高,傳統(tǒng)的人工碼垛只能應(yīng)用在物料輕便、尺寸和形狀變化大、吞吐量小的場合,這已經(jīng)遠(yuǎn)遠(yuǎn)不能滿足工業(yè)的需求,機器人碼垛機應(yīng)運而生。
機器人碼垛機是工作人員的手足與大腦功能延伸和擴展,它可以代替人們在危險、有毒、低溫、高熱等惡劣環(huán)境中工作;幫助人們完成繁重、單調(diào)、重復(fù)的勞動,提高勞動生產(chǎn)率,保證產(chǎn)品質(zhì)量。
碼垛工業(yè)機器人應(yīng)用優(yōu)勢
1.碼垛機器人的碼垛能力比傳統(tǒng)碼垛機,人工碼垛都要高的多;
2.結(jié)構(gòu)非常簡單,故障率低,易于保養(yǎng)及維修;
3.主要構(gòu)成零配件少,維持費用很低;
4.電源消耗低,電源消耗量大約機械式碼垛機的五分之一。
5.碼垛機械手臂可以設(shè)置在狹窄的空間,場地使用效率高,應(yīng)用靈活。
6.全部操作可在控制柜屏幕上手觸式完成,操作非常簡單。
7.碼垛機械手臂的應(yīng)用非常靈活,一臺機器手臂可以同時處理多6條生產(chǎn)線的不同產(chǎn)品。產(chǎn)品更新時,只須輸入新數(shù)據(jù),重新計算后即可進(jìn)行運行,無須硬件、設(shè)備上的改造與設(shè)置。
8. 垛型及碼垛層數(shù)可任意設(shè)置,垛型整齊,方便儲存及運輸。
簡言之:工作能力強、適用范圍大、占地空間小、靈活性高、成本低以及維護(hù)方便等多個方面的優(yōu)勢使其應(yīng)用漸為廣泛,并成為一種發(fā)展趨勢。

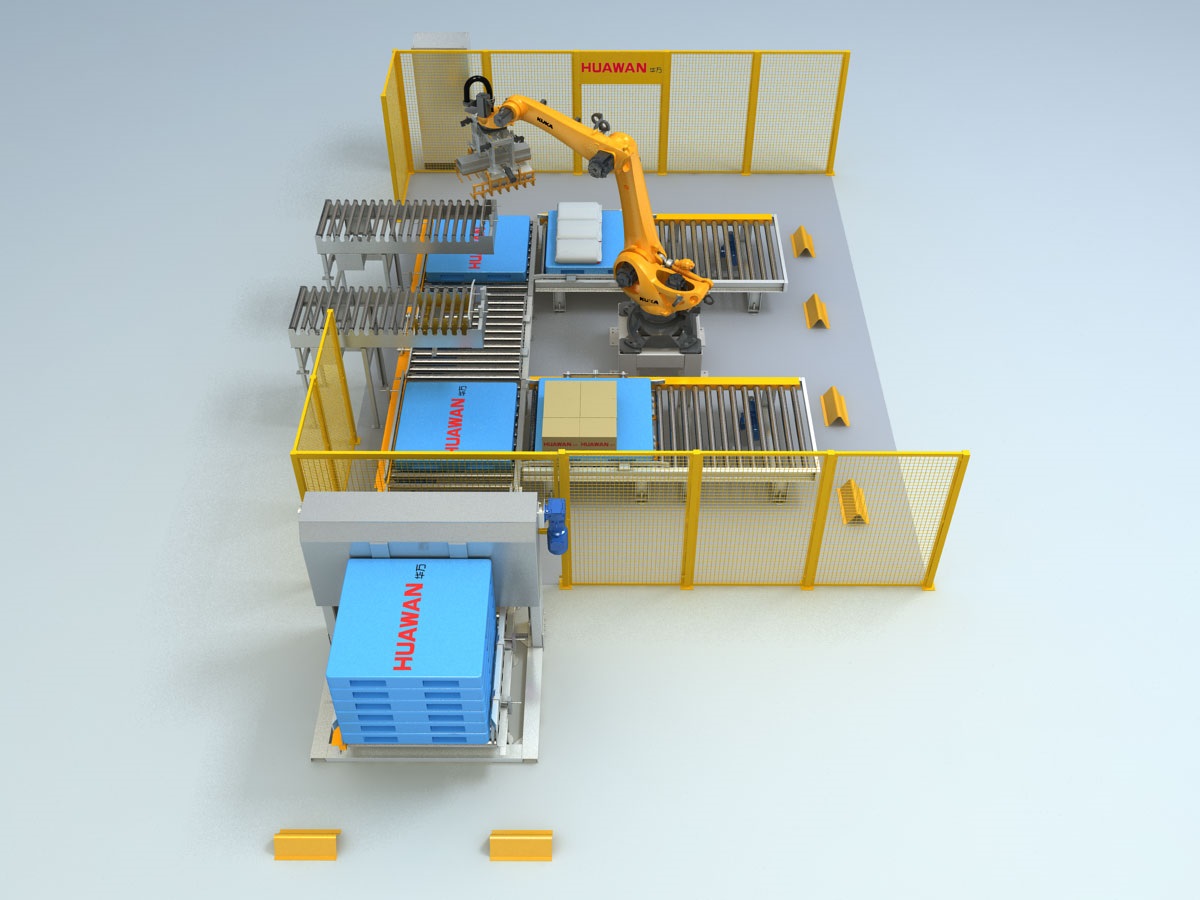
碼垛工業(yè)機器人生產(chǎn)線關(guān)鍵部件
1碼垛工業(yè)機器人機械抓手
作為碼垛機器人的重要組成部分之一,碼垛機械手(也稱手爪或抓手)的工作性能,包括高可靠性、結(jié)構(gòu)簡單新穎、質(zhì)量小等參數(shù)對碼垛機器人的整體工作性能具有非常重要的意義。
可根據(jù)不同的產(chǎn)品,設(shè)計不同類型的機械手爪,使得碼垛機器人具有著效率高、質(zhì)量好、適用范圍廣、成本低等優(yōu)勢,并能很好地完成碼垛工作。
2常用的碼垛機器人手抓主要包括?
夾抓式機械手爪,主要適用于高速碼袋,該類機械手手爪主要用于袋裝物的碼放,如面粉,飼料,水泥,化肥等等。
夾板式機械手爪,主要適用于箱盒碼垛,該類手爪主要用于整箱或規(guī)則盒裝包裝物品的碼放,可用于各種行業(yè)。可以一次碼一箱(盒)或多箱(盒)。
真空吸取式機械手爪,主要適用于可吸取的碼放物,該類手爪主要用于適合吸盤吸取的碼放物,如覆膜包裝盒,聽裝啤酒箱,塑料箱,紙箱等。
夾抓式機械手爪,適用于幾個工位的協(xié)作抓放,組合式手爪是前三種手爪的靈活組合,同時滿足多個工位碼放。
金屬檢測機,用于檢測食品、醫(yī)藥、化裝品、紡織等生產(chǎn)過程中混入的金屬異物。
重量復(fù)檢機,通過重量檢測,亦可判斷出成品的數(shù)量、漏裝和錯裝,以及對合格品、欠重品、超重品進(jìn)行分別統(tǒng)計,以達(dá)到產(chǎn)品質(zhì)量控制的目的。
自動剔除機,用于完成包裝袋在出現(xiàn)含金屬異常物以及包裝袋在稱重復(fù)檢超出重量誤差時,包裝袋在輸送序列被移出去的過程。自動剔除機也可集成到金屬檢測機或者重量復(fù)檢機內(nèi)。
倒袋機,是將輸送機送來的料袋按預(yù)定的編組程序?qū)α洗M(jìn)行輸送、倒袋和轉(zhuǎn)位,流轉(zhuǎn)到下道工序。
整形機,包裝袋經(jīng)過輸送線后,須經(jīng)過輥子的壓緊、整形,將包裝袋內(nèi)可能存在的積聚物均勻散開后才可以送至待碼輥道輸送機上。
待碼輸送機,與機械手爪配套,方便抓取。
其他傳送帶,便于物料輸送過程中的轉(zhuǎn)彎,以及與下一工序的對接。
聲明:本文章來源于機器人之家,如若侵權(quán),請聯(lián)系記者刪除。
發(fā)布日期:2021-03-15 17:16
發(fā)布日期:2021-03-15 18:05
發(fā)布日期:2021-03-15 18:05
發(fā)布日期:2019-05-09 14:23
發(fā)布日期:2019-05-08 13:19
發(fā)布日期:2019-05-07 10:33
發(fā)布日期:2019-05-06 14:08
發(fā)布日期:2019-05-06 13:29